

Subsea Humanoid Diver
Dual-Arm Operation via Remote Access
ROBSTER

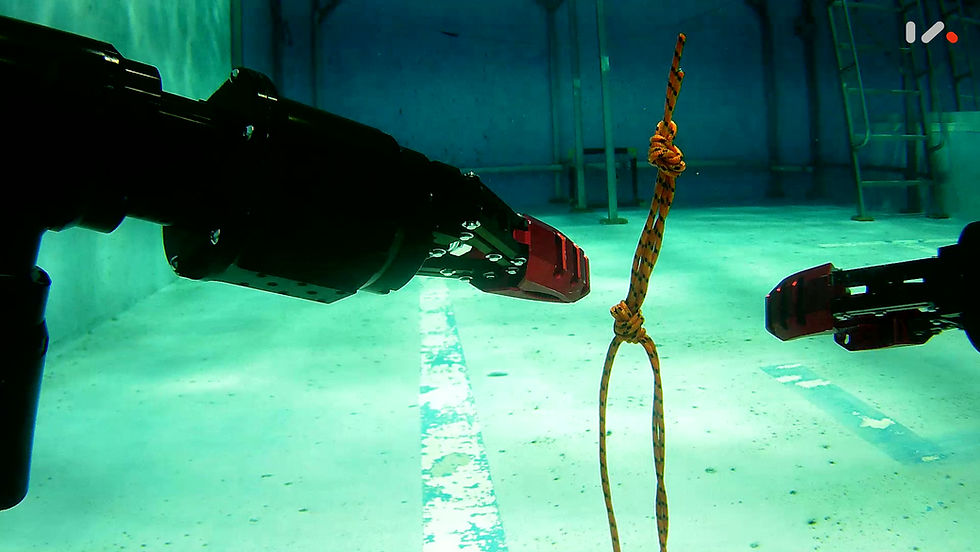
ROBSTER is a high-mobility, humanoid subsea robot engineered to replace and exceed the capabilities of professional divers. Its stable underwater operation and advanced control allow for precise inspection, observation, and monitoring of subsea infrastructure. By handling hazardous underwater tasks, ROBSTER reduces human exposure to risk while maintaining operational efficiency.
Designed for versatility, it supports a wide range of missions such as debris removal, non-destructive testing (NDT), hull maintenance, rope cutting, object retrieval, and explosive ordnance disposal (EOD).
ROBSTER is also built to function in radioactive subsea environments, making it a reliable solution for nuclear facility operations. Deployable across various sites from dams and water intakes to offshore platforms and subsea pipelines ROBSTER is redefining the future of industrial underwater work.

A High-Performance Underwater Robot for Reliable and Flexible Operation in NPPs
Omnidirectional
multi-degree-of-freedom control
Real-time communication and control
Supports mounting of NDT and custom tool
ROBSTER Series



ROBSTER v3
ROBSTER v2
ROBSTER R
Dimensions
(L×W×H)
800 x 450 x 550 (mm)
(Without Two Arms)
420 x 420 x 380 (mm)
500 x 460 x 300 (mm)
Weight
50 kg
(Including Two Arms)
25 kg
11.5 kg
Power
220 VAC
(Battery Option)
220 VAC
(Battery Option)
Battery
(220 VAC Option)
Robotic Arm
AQUARM
(Dual 6-DoF Arms)
-
-
Options
4K Full frame camera,
Sonar, DVL, etc.
Sonar, DVL, etc.
Lowering system,
Sonar, DVL, etc.
Precise 6 DoF Control Enabled by 8-Vector Thruster Configuration


ROBSTER is equipped with eight vectored thrusters that enable precise control of both position and orientation in three-dimensional space. Even when equipped with a robotic arm, the system can maintain stable, stationary 6-degree-of-freedom (6 DoF) control allowing for accurate manipulation tasks without requiring physical relocation. This makes it highly advantageous for operations that demand fine control in confined or dynamic subsea environments.
We provide comprehensive solutions for underwater operations in NPPs



